科技日報記者 朱虹 通訊員 李穎超
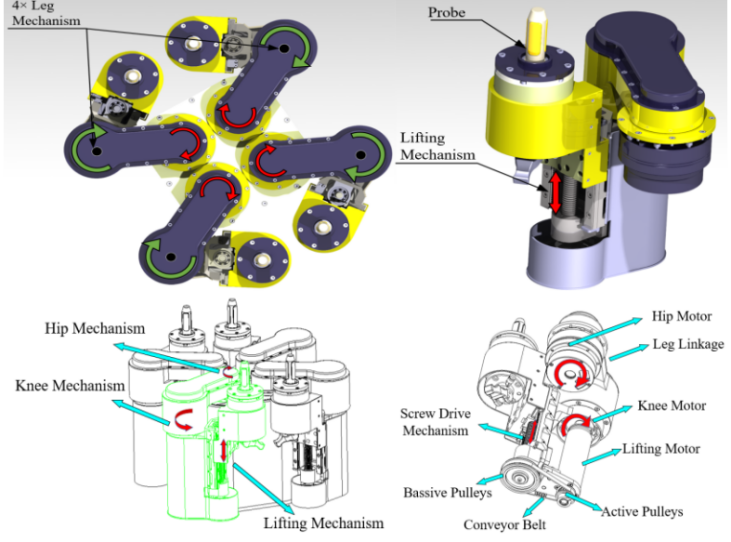
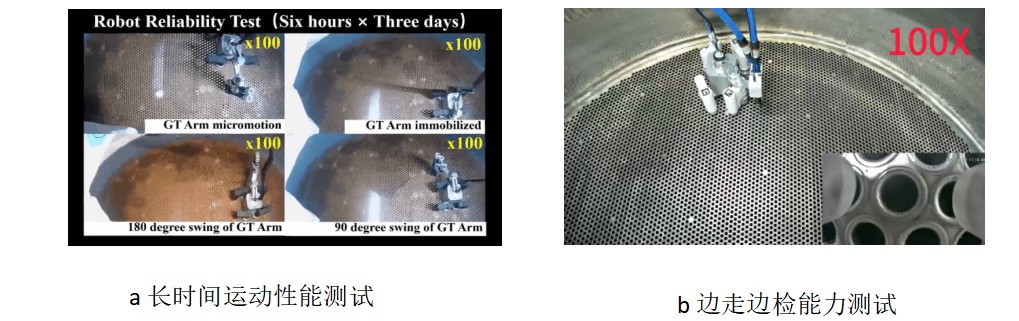
日前,在華龍一號機組內,一個身形小巧的四足機器人,緊緊“趴”在蒸汽發生器傳熱管上,對檢測探頭進行高效精準定位。只見其將“觸角”樣的探頭精準伸進管內,逐根采集著傳熱管的健康信息。6月20日,記者從哈爾濱工程大學了解到,這是該校與中廣核檢測技術有限公司、陽江核電有限公司合作共同研制的全球首臺四足傳熱管檢測機器人。它采用獨特的四足錨爪結構,具備變姿態快速爬行能力,實現了機器人四足爬行與檢測功能同步完成,能夠有效提升傳熱管檢測效率。

哈爾濱工程大學船舶工程學院教授王剛介紹,核電站蒸汽發生器傳熱管是核能安全的“主動脈”,傳熱管疲勞、缺陷、腐蝕如果未能及時發現,便有可能破裂造成安全事故。每根傳熱管外徑十幾毫米,管壁非常薄,數量近萬根。以往,傳熱管檢測機器人每走一步只能覆蓋近20個管孔,檢測完所有傳熱管一般需要10多天,耗時長、成本高。
針對傳統傳熱管檢測機器人難以適配多種蒸汽發生器型號、檢測時間長等問題,科研團隊研發出該型四足傳熱管檢測機器人,采用四足構型、高效運動規劃、視覺定位等技術,為核電設備智能運維提供了新型解決方案。
“這款機器人最大的優勢在于其靈活性和環境適應性。”王剛解釋道,自動鎖定的錨爪能夠確保機器人在斷電斷氣等意外情況下保持可靠的抓取狀態。如壁虎一樣的四足并聯行走機構讓機器人能夠靈活“爬行”在各種規格的管板上。團隊設計的雙探頭檢測臂具有360°旋轉能力和平面內冗余自由度,可確保機器人在一次定位中實現檢測工作空間的最大化。
在華龍一號的檢測過程中,四足傳熱管檢測機器人攜帶渦流檢測工具,通過單目視覺定位方法可實現機器人的自主定位,實現爬行與檢測同步進行,大幅縮減檢測過程中的移動時間。
目前,該成果已在中廣核集團核電機組實現工程應用,可覆蓋華龍一號等多種堆型,相比傳統傳熱管檢測機器人覆蓋率大幅提升,實現了傳熱管檢測的全覆蓋,大幅降低了工期和維護成本。
(哈爾濱工程大學供圖)